Ryotaro Yamamura
A robotics student
研究テーマ
ジャミンググリッパ※(粉体とやわらかい膜から構成され、あらゆる形状の物体を把持できるロボットハンド)で、 ものを掴むと人間のように触知でき、その結果から、ものを掴み直し、より複雑な作業ができるロボットハンドの研究開発を行っています。
A robotics student
研究テーマ
ジャミンググリッパ※(粉体とやわらかい膜から構成され、あらゆる形状の物体を把持できるロボットハンド)で、 ものを掴むと人間のように触知でき、その結果から、ものを掴み直し、より複雑な作業ができるロボットハンドの研究開発を行っています。

神戸市立工業高等専門学校 機械工学科
(2018-2019 清水研究室所属)
神戸市立工業高等専門学校専攻科 機械システム工学専攻
(2019-2021 清水研究室所属)
奈良先端科学技術大学院大学 先端科学技術研究科 先端科学技術専攻
(2021-NOW ヒューマンロボティクス研究室所属)

開発言語ツール
使用経験のある計測機器、工作機械、その他のツール
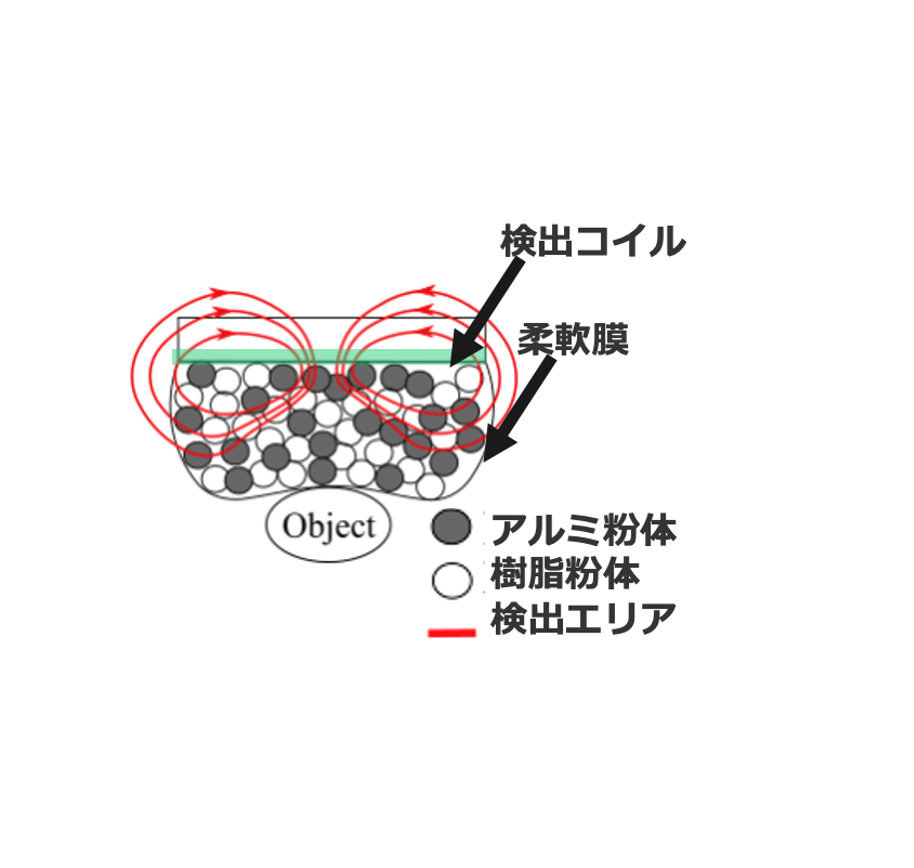
人間の手のような動作の実現を目指して、ジャミンググリッパのセンサ化の研究とロボットアームの制御の研究に取り組んでいます。 センサ化の研究では、グリッパ内部の粉体に金属材料を使用し、グリッパを対象物に押し付けた時の粉体の密度変化を磁気式のセンサで計測します。 この手法を用いることで把持性能を損なうことなくセンサを有するグリッパの開発に成功しました(特許出願済)。 ロボットアームの研究では、センサで計測したデータを動作指令に変換する制御システムの開発を行っています。

従来、ジャミンググリッパのセンサ化には、柔軟膜部にセンサ素子を取り付ける手法などが提案されていました。 しかし、この手法では膜部の柔軟性がセンサ素子に阻害され、膜の耐久性や、把持性能そのものが低下してしまうという課題がありました。 そこで私は”柔軟膜”ではなく、”粉体”に対するセンシング技術を確立することで、把持性能を損なわず、操作精度を向上できないかと考えました。 現在、密度変化を計測する手法を用いて一定の有意差を持ったデータの取得に成功しています。
機械学習を用いてセンサからの情報を解析し、 解析されたデータを元にロボットアームでの操作を行います。機械学習ではSVM(サポートベクターマシーン)によってグリッパの把持状態を分類し、 分類されたデータを元にロボットアームを操作します。操作部分のアルゴリズム開発が今後の課題です。

グリッパの柔らかさ・複雑な動きを活かして、さまざまなフィールドでの実用化を目指しています。 たとえば、農業分野では野菜を傷つけず繊細な動作で収穫を行うロボット、医療介護分野では看護師や介護士などに代わって食事をサポートするロボット。 他にも、私自身でまだ想像できていない領域で、人の役に立つ可能性があるのではないかと感じています。 この研究は人とロボットが協働する未来を掴めると確信しています。
神戸高専清水研究室では万能真空吸着ハンド(Universal Vacuum Hand, 以降UVH)の研究に従事していました。 UVHは、”粉体”と”膜”からなるやわらかい吸盤部を持つ真空吸盤で、平面、凹凸面、曲面に密着することで、タイル面、食器、ワインボトル等に吸着します。 また、”粉体を使ったセンサ”によってグリッパの吸盤部の変形を計測することも可能です。 金属粉体の密度によって電気抵抗が変わる特性を応用して、グリッパの吸着性能を損なうことなくハンドの変形をとらえることに成功しました。

奈良先端大学のリサーチアシスタントとして国立研究開発法人新エネルギー・産業技術総合開発機構が統括する研究プロジェクトに参画し、ゴミの分別を行うシステム開発を担当しました。 担当した研究では、ベルトコンベアを流れる金属ゴミが密集したまま選別機に入らないように、金属ゴミをロボットアームで密集度調節することが求められました。 私はロボットのグリッパに、”ほうき”を使うことで、より効率的な密集度調節を目指しました。成果は国内会議(RSJ2021)で発表しました。

自律移動ロボットNavit(oo)n (ナビトン)は、人や自転車が行き交う市街地をぶつかること無く自動で走行 2025年の大阪万博にて自動でゴミ拾いを行うことを目標として研究中です。 中之島ロボットチャレンジに参加し大阪中之島公会堂の周辺を走行し実証実験を行っています。 2019年大会ではゴミ判別マイルストーンの認識タスクを担当しました。

WRSとは、ロボットの活躍が期待されるさまざまな分野において、世界中から集結したチームがロボットの技術やアイディアを競う競技会です。 Extreme Q-ban Boys(神戸高専チーム)は吸着に特化した等身大ヒューマノイドロボット、Q-botで接客・清掃タスクに参加しました。

スタジオエスケープとはリアル脱出ゲーム体験施設です。 マイコンやサーボモータなどを用いてゲームに使われる内部の装置作りを担当しました。
